English Quiz For SBI PO Exam 2019
The SBI PO Prelims Exam is scheduled to be held in a few days and to ace your preparations Bankersadda is launching a crash course of 18 days to help you excel the exams. Here is a quiz on English Language being provided by Adda247 for free to let you practice the best of latest pattern English Questions for SBI PO Examination 2019-20. Video Solutions will also be provided for the same for free.
Directions (1-5): In the following questions two columns are given containing three sentences/phrases each. In first column, sentences/phrases are A, B and C and in the second column the sentences/phrases are D, E and F. A sentence/phrase from the first column may or may not connect with another sentence/phrase from the second column to make a grammatically and contextually correct sentence. Each question has five options, four of which display the sequence(s) in which the sentences/phrases can be joined to form a grammatically and contextually correct sentence. If none of the options given forms a correct sentence after combination, mark (E), i.e. “None of these” as your answer.
Q1. 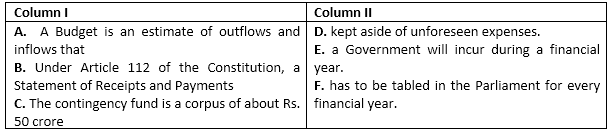
A-F, C-E and B-D
A-E
A-E and B-F
C-D and A-E
None of these
Solution:
A-E and B-F form grammatically and contextually correct and meaningful sentences. In the combination C-D, 'for' must be used in place of 'of' in part D to form a meaningful sentence.
Q2. 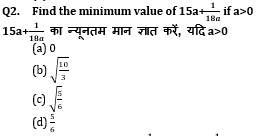
A-F, C-E and B-D
A-E and C-D
A-E and B-F
C-D
None of these
Solution:
Only A-E and C-D make grammatically and contextually correct and meaningful sentences.
Q3. 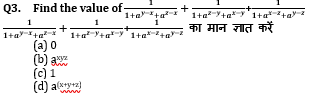
A-F, C-E and B-D
A-E
A-E and B-F
C-D
None of these
Solution:
A-F, C-E and B-D make grammatically and contextually correct and meaningful sentences.
Q4. 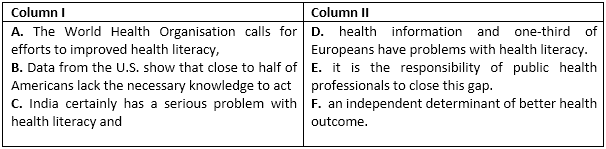
A-F, C-E and B-D
A-E
A-E and B-F
C-E
None of these
Solution:
Only C-E makes grammatically and contextually correct and meaningful sentences.
Q5.
A-F, C-E and B-D
A-E
A-E and B-F
C-D
None of these
Solution:
A-F, C-E and B-D make grammatically and contextually correct and meaningful sentences.
Directions (6-13): Read the following passage and answer the following questions given below. Some words are given in bold to help you answer some of the questions given below.
It is a well-known fact that one can learn and remember things easily if it has got both audio and visual aids instead of just audio. Keeping this thing in mind, many study sessions are taken where students are taught with the help of videos. Cinema has been popular since its inception. People came to realize that students can remember more through videos than just from verbal sessions as they observed kids remembering dialogue of the movie they watched a week ago but nothing from the lecture they attended in the morning.
Humans have this tendency of adopting the way of talking, walking and behaving of the person they are with for a long time. A person always leaves a mark in other person’s head according to his behaviour. This notion is more popular among the people belonging to the teenage and also among the kids of age less than 13 years as they have massive grasping power. They want to mimic and copy everything they see in the cinemas, hairstyles, fashion, actions, body language, way of talking, everything. They think that by doing all this they can become popular and cool which seems to be important for today’s youth.
Cinema is basically considered as the best among all means of entertainment. Young people watch cinema to get relax and entertained though along with this they learn a number of new things. The normal human tendency is to apply these things in their lives too. That is why it is very important that they grab only the positive points from the cinemas. As youth is the future of any nation so it is essential that they build a positive mindset. It is thus essential for them to watch good quality of cinema that helps them grow mentally and makes them more knowledgeable and mature. Not only the actions and body language but their level of command on the language is also influenced by the cinema. Moreover, many movies don’t just entertain, but also provide lots of information regarding different aspects of life. It also helps the young to develop an open-minded mentality which can be very helpful for their progress in lives.
Cinema has both negative and positive impact on the youth. In the form of action, showing various ways of killing people is a common sight in the movies these days. These things affect the people watching it at a psychological level. They create a mentality among the youth that to show power you need to fight with few, kill few or dominate few. This is a very wrong notion. Not just this, even the adult scenes, are misguiding for the youth which do not have proper understanding of what is wrong and what is right. Moreover, too much time and money is also wasted on viewing cinema. Hence, cinema impacts the youth in various ways. However, it depends on their maturity and understanding on what they adopt the most.
Humans have this tendency of adopting the way of talking, walking and behaving of the person they are with for a long time. A person always leaves a mark in other person’s head according to his behaviour. This notion is more popular among the people belonging to the teenage and also among the kids of age less than 13 years as they have massive grasping power. They want to mimic and copy everything they see in the cinemas, hairstyles, fashion, actions, body language, way of talking, everything. They think that by doing all this they can become popular and cool which seems to be important for today’s youth.
Cinema is basically considered as the best among all means of entertainment. Young people watch cinema to get relax and entertained though along with this they learn a number of new things. The normal human tendency is to apply these things in their lives too. That is why it is very important that they grab only the positive points from the cinemas. As youth is the future of any nation so it is essential that they build a positive mindset. It is thus essential for them to watch good quality of cinema that helps them grow mentally and makes them more knowledgeable and mature. Not only the actions and body language but their level of command on the language is also influenced by the cinema. Moreover, many movies don’t just entertain, but also provide lots of information regarding different aspects of life. It also helps the young to develop an open-minded mentality which can be very helpful for their progress in lives.
Cinema has both negative and positive impact on the youth. In the form of action, showing various ways of killing people is a common sight in the movies these days. These things affect the people watching it at a psychological level. They create a mentality among the youth that to show power you need to fight with few, kill few or dominate few. This is a very wrong notion. Not just this, even the adult scenes, are misguiding for the youth which do not have proper understanding of what is wrong and what is right. Moreover, too much time and money is also wasted on viewing cinema. Hence, cinema impacts the youth in various ways. However, it depends on their maturity and understanding on what they adopt the most.
Q6. What do humans adopt from another person they are with for a very long time, according to the passage?
Pattern of talking
Pattern of walking
Pattern of behaving
Only (B) and (C)
All (A), (B) and (C)
Solution:
All (a), (b) and (c) are correct. Refer paragraph 2 of the passage.
Q7. In what ways does cinema has a negative impact on the youth?
By showing various ways of killing people
By showing adult scenes
By wasting time and money
All (A), (B) and (C)
None of the above
Solution:
All (a), (b) and (c) are correct. Refer paragraph 4 of the passage.
Q8. Which of the following is FALSE in context of the passage?
A person never leaves a mark in other person’s head according to his behaviour.
Cinema has both negative and positive impact on the youth.
Cinema is basically considered as the best among all means of entertainment.
Young people watch cinema to get relax and entertained though along with this they learn a number of new things.
All are true
Solution:
Only option (a) is false in context of the passage. Refer paragraph 2 of the passage.
Q9. What other than action and body language of the youth, is influenced by cinema?
Metabolism
Level of command on the language
Anxiety levels
Stress levels
Blood sugar level
Solution:
Only option (b) is correct. Refer paragraph 3 of the passage.
Q10. Which of the following is SIMILAR to the word INCEPTION given in BOLD?
completion
end
outset
outgrowth
stop
Solution:
‘Outset’ is similar in meaning to ‘inception’. Inception means beginning or start.
Q11. Which of the following is OPPOSITE to the word GRASPING given in BOLD?
avaricious
generous
mean
extorting
covetous
Solution:
‘Generous’ is opposite in meaning to ‘grasping’. Grasping means greedy.
Q12. Which of the following words can replace the word ESSENTIAL given in BOLD without changing the meaning of the sentence?
dubious
satisfy
loose
duty
necessary
Solution:
‘Necessary’ can replace ‘essential’ without changing the meaning of the sentence.
Q13. Which of the following can be the most suitable title for the above passage?
The different types of learning techniques
Cinema and its impact on the youth
The curse of cinema
The misguided youth
None of the above
Solution:
‘Cinema and its impact on the youth’ is the most suitable title for the passage.
Directions (14-20): Read the following passage and answer the following questions given below.
Global warming is a threat to coral reef ecosystems. Scientific evidences have clearly (A)-------------- that the earth and oceans are warming. Climate change is the result of excessive amount of greenhouse gases in the atmosphere released from human activities. (B) The oceans are extremely massive sinks that absorb carbon dioxide from the atmosphere impact the chemical and biological processes in them.
Due to the rise in temperature, coral bleaching events and coral diseases have (C)---------------- increased and are occurring more frequently. Coral diseases cause pervasive mortality among reef building corals. (D) Many scientists believe that the rise in mortality is due to the deteriorating quality of water attributed to man-made pollution and rise in ocean surface temperature. Carbon dioxide dissolved in to the ocean from the atmosphere has begun to reduce coral reef calcification rates in reef associated and reef building marine organisms by changing sea water chemistry due to prolonged reduction in seawater pH level. This is known as ocean acidification.
Changing climate will further affect the coral reef ecosystem (E)------------------ rising sea level and changes in intensity and frequency of tropical storms and changing circulation patterns in oceans. This will change the ecosystem functions and the supplies and services provided by coral reef ecosystem to the people around the world.
Changing climate will further affect the coral reef ecosystem (E)------------------ rising sea level and changes in intensity and frequency of tropical storms and changing circulation patterns in oceans. This will change the ecosystem functions and the supplies and services provided by coral reef ecosystem to the people around the world.
Q14. Which of the following words should fill in the blank in (A) to make a contextually correct and meaningful sentence?
signal
embark
indicated
protect
None of the above
Solution:
‘Indicated’ is the correct option here.
Q15. In the passage given, a sentence (B) is given in BOLD. There may or may not be an error in one part of the sentence. Choose the part which has an error in it as your answer. If there in no error then choose option (E) as your answer.
The oceans are extremely massive sinks
that absorb carbon dioxide
from the atmosphere impact the chemical
and biological processes in them
No error
Solution:
The error is in option (c). It should be ‘impacting’ instead of ‘impact’ as the sentence is in present continuous tense.
Q16. Which of the following words should fill in the blank in (C) to make a contextually correct and meaningful sentence?
significantly
rudely
gainsay
timid
increasingly
Solution:
‘Significantly’ is the correct option here.
Q17. In the passage given, a sentence (D) is given in BOLD. There may or may not be an error in one part of the sentence. Choose the part which has an error in it as your answer. If there in no error then choose option (E) as your answer.
Many scientists believe that the rise in
mortality is due to the deteriorating
quality of water attributed to man-made pollution
and rise in ocean surface temperature
No error
Solution:
No error
Q18. Which of the following words should fill in the blank in (E) to make a contextually correct and meaningful sentence?
could
although
though
through
None of these
Solution:
‘Through’ is the correct option here.
Q19. Which of the following is OPPOSITE to the word PROLONGED given in BOLD?
lengthened
shortened
dull
due
None of the above
Solution:
‘Shortened’ is opposite in meaning to ‘prolonged’. Prolonged means to be long in durations
Q20. Which of the following is OPPOSITE to the word PROVIDED given in BOLD?
give
delay
consumes
arrange
None of the above
Solution:
‘Consume’ is opposite in meaning to ‘provided’.
Directions (21-25): Rearrange the following sentences (A), (B), (C), (D) and (E) in the proper sequence to form a meaningful paragraph and then answer the questions given below.
A. This caused the price of Brent crude oil to witness a sudden jump to more than $75, from last week’s close of $71.97, as traders expected the withdrawal of the waivers to adversely affect the supply of oil in the market.
B. The oil market is in ferment once again with a great deal of uncertainty over supplies.
C. The price of Brent crude, it is worth noting, has been rising steadily in the last few months, and has increased by almost 50% since it hit a low of about $50 in December, as a result of the decision of the Organisation of the Petroleum Exporting Countries (OPEC) to restrict their output to boost prices.
D. On Monday the United States announced that it would not extend beyond May 1 the 180-day waiver it had granted to eight countries, including India, to purchase oil from Iran.
E. India imports more than 10% of its crude oil from Iran, so the government faces the immediate challenge of having to find alternative suppliers to meet its huge energy needs.
Q21. Which is the PENULTIMATE step after rearrangement?
A
B
C
D
E
Solution:
The order of the sentences after rearrangement is BDACE.
Q22. Which is the LAST step after rearrangement?
A
B
C
D
E
Solution:
The order of the sentences after rearrangement is BDACE.
Q23. Which is the THIRD step after rearrangement?
A
B
C
D
E
Solution:
The order of the sentences after rearrangement is BDACE.
Q24. Which is the SECOND step after rearrangement?
(a) A
(b) B
(c) C
(d) D
(e) E
(a) A
(b) B
(c) C
(d) D
(e) E
A
B
C
D
E
Solution:
The order of the sentences after rearrangement is BDACE.
Q25. Which is the FIRST step after rearrangement?
A
B
C
D
E
Solution:
The order of the sentences after rearrangement is BDACE.
Directions (26-30): Rearrange the following sentences (A), (B), (C), (D) and (E) in the proper sequence to form a meaningful paragraph and then answer the questions given below.
A. With operations halted and the half a dozen or so planes that were flying till Wednesday grounded, the airline is staring down the barrel, especially because most of its prized departure slots at major airports across the country have either already been or will soon be allocated to other airlines.
B. Despite intense lobbying by the bankrupt airline, banks stood firm on their decision to not release emergency funds to sustain operations until a white knight is found.
C. To the long line of private airline carcasses dotting the bleak landscape of Indian aviation, one more may soon be added.
D. Jet will be able to regain these slots only if it bounces back before the end of the summer schedule in October.
E. Jet Airways announced a temporary halt of its operations from Wednesday night as funds to keep the airline going dried up.
Q26. Which of the following is the SECOND step after rearrangement?
A
B
C
D
E
Solution:
The order of the sentences after rearrangement is CEBAD.
Q27. Which of the following is the THIRD step after rearrangement?
(a) A
(b) B
(c) C
(d) D
(e) E
(a) A
(b) B
(c) C
(d) D
(e) E
A
B
C
D
E
Solution:
The order of the sentences after rearrangement is CEBAD.
Q28. Which of the following is the FOURTH step after rearrangement?
(a) A
(b) B
(c) C
(d) D
(e) E
(a) A
(b) B
(c) C
(d) D
(e) E
A
B
C
D
E
Solution:
The order of the sentences after rearrangement is CEBAD.
Q29. Which of the following is the LAST step after rearrangement?
(a) A
(b) B
(c) C
(d) D
(e) E
(a) A
(b) B
(c) C
(d) D
(e) E
A
B
C
D
E
Solution:
The order of the sentences after rearrangement is CEBAD.
Q30. Which of the following is the FIRST step after rearrangement?
(a) A
(b) B
(c) C
(d) D
(e) E
(a) A
(b) B
(c) C
(d) D
(e) E
A
B
C
D
E
Solution:
The order of the sentences after rearrangement is CEBAD.
- Tips and Tricks To Solve Cloze Test Questions For Bank and Other Competitive Exams
- Reading Comprehension Tips For SBI Clerk Exam 2018
- Conjunctions: English Language Notes for Bank and Other Competitive Exams

 English Quiz For NIACL AO Mains 2024 Exa...
English Quiz For NIACL AO Mains 2024 Exa...